红外遥控
目录
一、基础知识
二、硬件连接
三、基础应用(图形化)
四、基础应用(Python)
五、相关课程链接
一、基础知识
红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机和手机系统中。如图1所示。
红外遥控的发射电路是采用红外发光二极管来发出经过调制的红外光波;红外接收电路由红外接收二极管、三极管或硅光电池组成,它们将红外发射器发射的红外光转换为相应的电信号,再送后置放大器。
发射机一般由指令键(或操作杆)、指令编码系统、调制电路、驱动电路、发射电路等几部分组成。当按下指令键或推动操作杆时,指令编码电路产生所需的指令编码信号,指令编码信号对载波进行调制,再由驱动电路进行功率放大后由发射电路向外发射经调制定的指令编码信号。
接收电路一般由接收电路、放大电路、调制电路、指令译码电路、驱动电路、执行电路(机构)等几部分组成。接收电路将发射器发出的已调制的编码指令信号接收下来,并进行放大后送解调电路,解调电路将已调制的指令编码信号解调出来,即还原为编码信号。指令译码器将编码指令信号进行译码,最后由驱动电路来驱动执行电路实现各种指令的操作控制(机构).
二、硬件连接
跟红外遥控相关的有三种元器件,分别是红外遥控发射器、红外遥控接收器及红外遥控板(集成发射及接收功能)。分别如下图
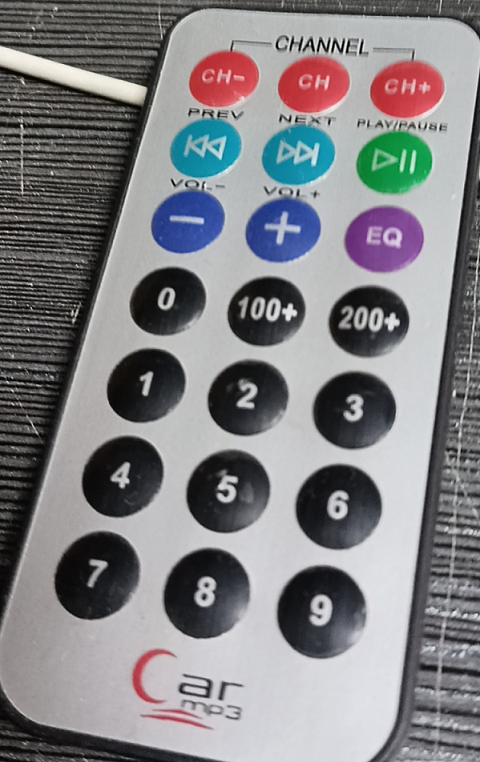
图1 红外遥控发射器

图2 红外遥控接收器
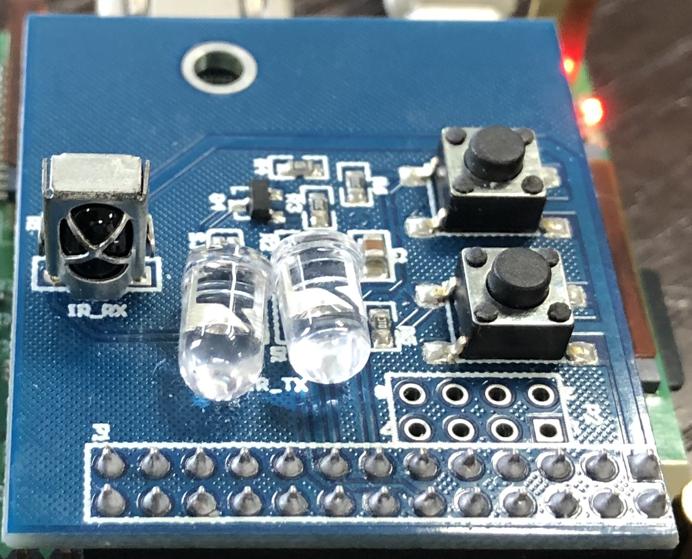
图3 红外遥控板
红外遥控接收器跟树莓派的连线比较简单,即 + 接vcc, - 接gnd, S接一个GPIO即可。如下图
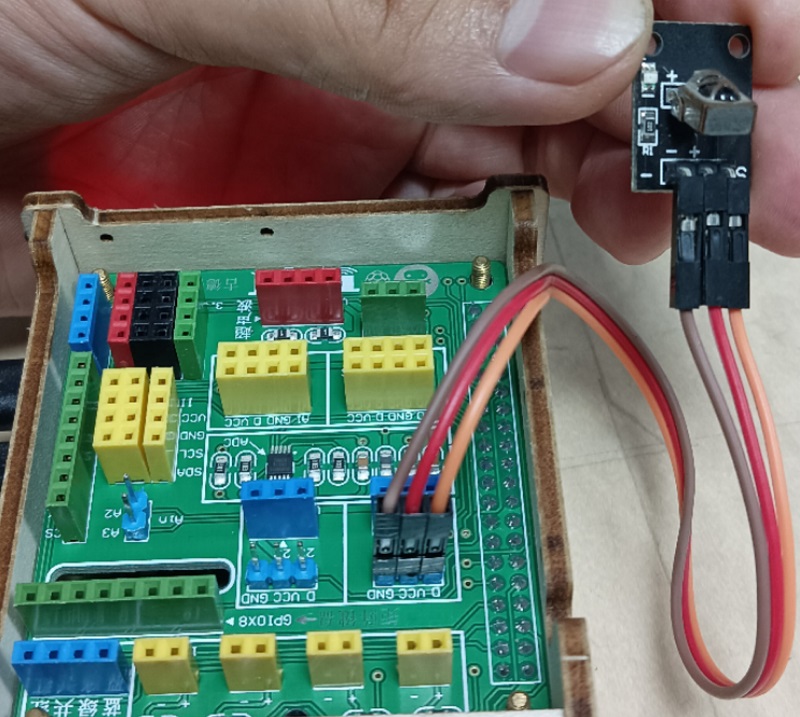
图4 红外遥控接收器跟树莓派连线方式
红外遥控板跟树莓派连接方式如下图。

图5 红外遥控板跟树莓派连线方式
三、场景应用
红外遥控功能有三种常用的应用场景。
场景1:红外遥控发射器和接收器组合使用
用红外遥控发射器发射红外信号,树莓派使用接收器接收红外信号。 如下图。

首先要将树莓派设置为红外接收模式。按照上图的接线,GPIO设置为18.(这里需要根据实际接线来设置)。
注意:设置完后树莓派会自动重启。重启后就不需要再次设置了。

然后进行简单编程测试红外接收功能是否正常。运行如下图代码,然后红外遥控发射器对准红外接收器,并按下,调试窗口应该就有按键信息打印出来。
场景2:红外遥控发射器和红外遥控板组合使用
用红外遥控发射器发射红外信号,树莓派使用红外遥控板上的接收器来接收红外信号。

首先要将树莓派设置为红外接收模式。GPIO设置为18.(这里固定为18)。
注意:设置完后树莓派会自动重启。重启后就不需要再次设置了。
然后进行简单编程测试红外接收功能是否正常。运行如下图代码,然后红外遥控发射器对准红外遥控板的接收器(黑色的小灯),并按下,调试窗口应该就有按键信息打印出来。
场景3:红外遥控板和机器人组合使用
树莓派使用红外遥控板上的发射器发射红外信号,机器人来接收红外信号。
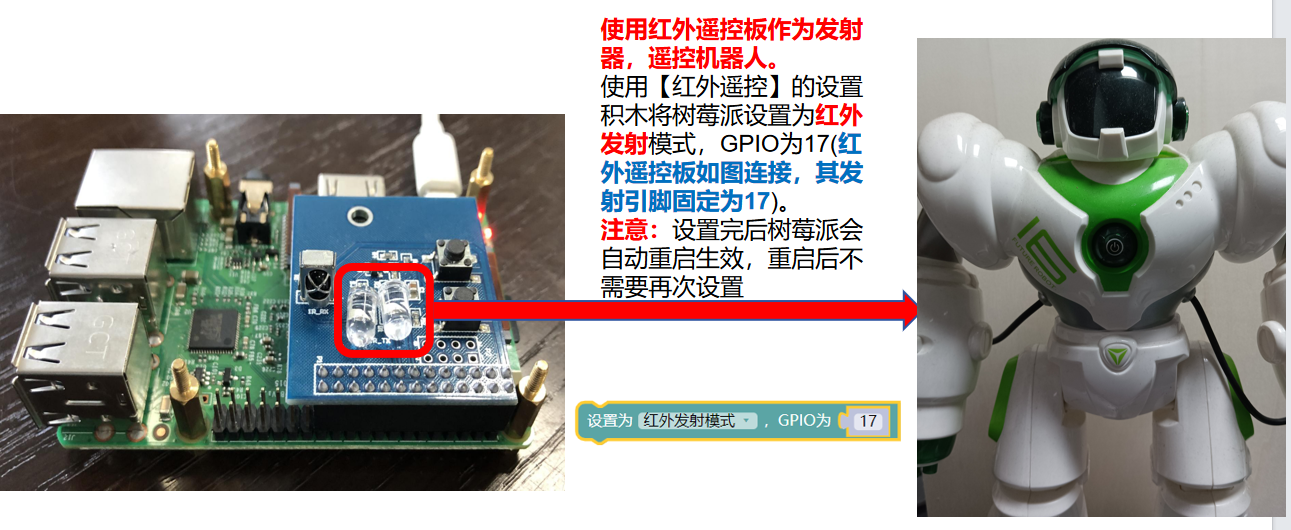
首先要将树莓派设置为红外发射模式。GPIO设置为17.(这里固定为17)。
注意:设置完后树莓派会自动重启。重启后就不需要再次设置了。

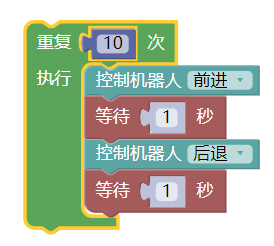
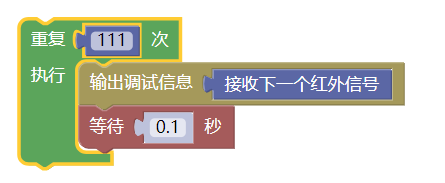
然后进行简单编程测试红外发射功能是否正常。将机器人开机,将红外控制板的发射器(两个透明的小灯)对准机器人,然后运行如下图代码,此时机器人应该会有反应。