六足机器人积木块区
六足机器人以树莓派4B为控制主机,通过控制六足上的18个高压总线舵机来控制机器人的移动和动作。
下图所示为六足机器人上使用元器件。

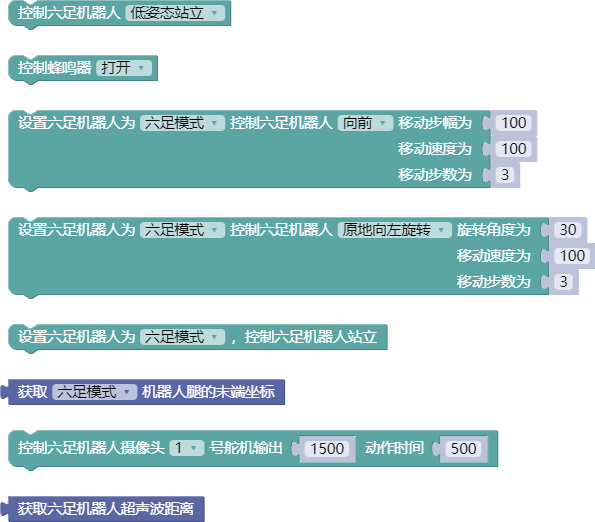
1. 积木功能说明

- 功能简介:控制六足机器人作出相应的动作。
- 参数说明:
- 参数1:下拉选择不同的姿势或动作。
- 返回值:无。
- 注意事项:运行该积木是需要提前设置树莓派模式为串口模式。

- 功能简介:控制六足机器人蜂鸣器打开或关闭。
- 参数说明:打开或关闭蜂鸣器。
- 返回值:无。

- 功能简介:控制六足机器人以不同的移动姿势移动,可以通过后三个参数调节相应的速度、步伐大小、步伐次数。
- 参数说明:
- 参数1:六足模式或四足模式,六足模式即:六个关节一起配合实现移动,四足模式即:后四个关节配合实现移动;
- 参数2:控制六足机器人的移动方向,前进、后退、左移、右移;
- 参数3:移动步幅,即六足机器人每一步跨出的距离,单位为mm;
- 参数4:移动速度,即六足机器人六足移动的速度,范围为30-200,单位为mm/s;
- 参数5:移动的次数,左右关节各移动一次,为一个步数。
- 返回值:无。
- 注意事项:该积木为阻塞模式,六足机器人执行动作完毕后,运行下一个积木。

- 功能简介:控制六足机器人以不同的移动姿势原地旋转。
- 参数说明:
- 参数1:六足模式或四足模式,六足模式即:六个关节一起配合实现移动,四足模式即:后四个关节配合实现移动;
- 参数2:控制六足机器人的旋转方向,逆时针或顺时针;
- 参数3:旋转角度,每一次动作旋转的角度,单位为:°;
- 参数4:移动速度,即六足机器人六足移动的速度,范围为30-200,单位为mm/s;
- 参数5:移动的次数,左右关节各移动一次,为一个步数。
- 返回值:无。
- 注意事项:该积木为阻塞模式,六足机器人执行动作完毕后,运行下一个积木。

- 功能简介:控制六足机器人以不同的移动姿势站立。
- 参数说明:
- 参数1:六足模式或四足模式,六足模式即:六个关节一起配合实现站立,四足模式即:后四个关节配合实现站立。
- 返回值:无。

- 功能简介:获取六足机器人六个肢体的末端坐标。
- 参数说明:
- 参数1:六足模式或四足模式,如果是六足模式操控六足机器人,该参数需要对应也为六足模式,反之为四足模式。
- 返回值:姿态数据为3x6的数组,表示6条腿的的末端的x,y,z坐标,单位mm; 头部朝前的方向为x轴,头部朝前位置为负方向,右边为y轴正, 竖直朝上为z轴正, 从中间两条腿的连线的中点做垂线与上下板相交,取连线中心为零点; 第一条腿表示头部朝前时左上角所在腿, 逆时针表示1-6;

- 功能简介:控制六足机器人摄像头的云台舵机角度。
- 参数说明:
- 参数1:选择需要控制的舵机,一号舵机控制身行头的上下旋转角度,二号舵机控制摄像头的左右旋转角度;
- 参数2:控制舵机旋转,范围为500-2500,对应0°-180°;
- 参数3:舵机输出做出动作的延迟(阻塞)时间,单位为:ms,一般默认即可。
- 返回值:无。

- 功能简介:获取六足机器人的超声波数据。
- 参数说明:无。
- 返回值:返回超声波测得的距离,单位为CM,范围为:0.4-500cm。
2. 积木块应用案例
- 下面的例子展示了如何控制六足机器人的。
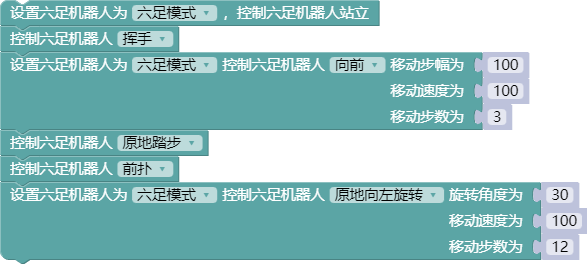
(图1)六足机器人简单控制案例
- 点击这里下载本案例代码。
- 下面的例子展示了如何使用机械臂通过物体检测然后吸取物体。
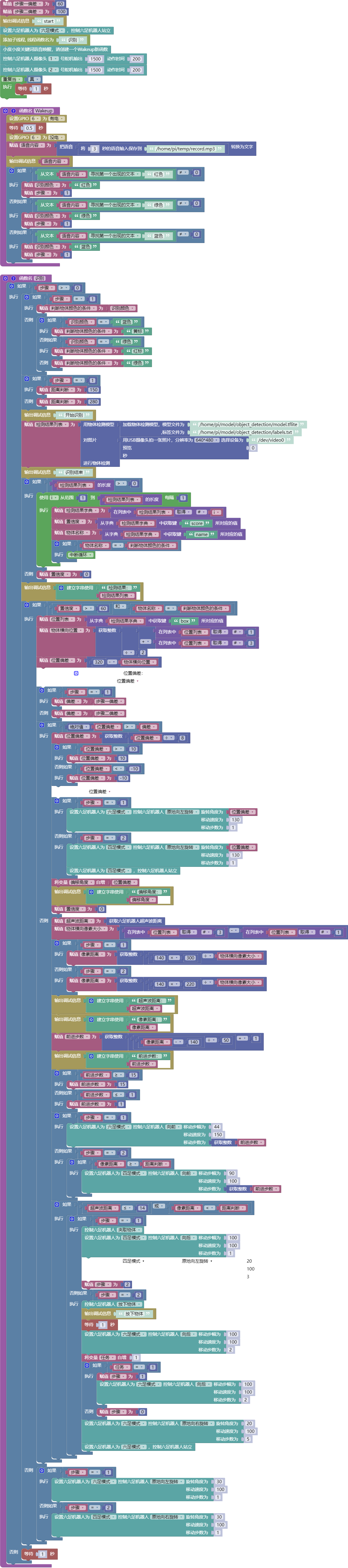
(图2)六足机器人语音夹取+指定位置连续夹取案例
- 点击这里 下载本案例代码。