机器狗积木块说明
1. 积木功能说明

- 功能简介:把图片显示到机器狗头部的显示屏上。
- 参数说明:
- 返回值:无。

- 功能简介:清空机器狗头部的显示屏。
- 参数说明:无。
- 返回值:无。

- 功能简介:开启机器狗摄像头预览,摄像头的画面会显示到机器狗的显示屏上。开启预览过程中可以调用拍照积木进行拍照。
- 参数说明:无。
- 返回值:无。

- 功能简介:停止机器狗摄像头预览。
- 参数说明:无。
- 返回值:无。

- 功能简介:控制机器狗头部的摄像头进行拍照。没有开启摄像头预览进行拍照时,拍照的照片同时会显示到显示屏上。
- 参数说明:无。
- 返回值:所拍照片的保存路径。

- 功能简介:判断机器狗头部的按钮是否按下。
- 参数说明:
- 返回值:按下返回True,否则返回False。

- 功能简介:控制机器狗进行平移。
- 参数说明:
- 返回值:无。
- 注意:参数1括号中数字为该方向移动步长的取值范围,当步长超过范围时,按照极限值运动。

- 功能简介:控制机器狗进行原地旋转。
- 参数说明:
- 参数1:旋转方向。
- 参数2:旋转速度,单位为°/s。
- 返回值:无。
- 注意:参数1括号中数字为旋转的速度取值范围,当旋转速度超过范围时,按照极限值旋转。

- 功能简介:控制机器狗进行原地踏步。
- 参数说明:
- 参数1:抬腿高度。取值范围为10-35mm,当输入值超过该范围时,按照极限值进行踏步。
- 返回值:无。

- 功能简介:控制机器狗停止移动。
- 参数说明:无
- 返回值:无。

- 功能简介:控制机器狗机身平移,机器狗的4条腿的足端位置不变。
- 参数说明:
- 参数1:机身平移方向,包括X、Y、Z轴三个方向。X轴即前后方向,Y轴即左右方向,Z轴即上下方向。
- 参数2:平移的距离。
- 返回值:无。
- 注意:此处坐标系为整机坐标系:在初始站姿情况下,原点位于机身正下方,
机器狗前进方向为X轴正向,左为Y轴正向,上为Z轴正向。沿X轴(即前后)平移范围[-35,35]mm。沿Y轴(即左右)平移范围[-18]mm。沿Z轴(即上下)平移范围[75,115]mm。

- 功能简介:调整机身姿态,控制机身按照某个坐标轴旋转。
- 参数说明:
- 参数1:机身旋转方向,包括X、Y、Z轴三个方向。
- 参数2:机身旋转角度。
- 返回值:无。
- 注意:此处坐标轴基于正极坐标系,沿X轴转动(即翻滚角)角度范围[-20,20]度,
沿Y轴转动(即俯仰角)角度范围[-15,15]度,沿Z轴转动(即偏航角)角度范围为[-11,11]度。

- 功能简介:控制机器狗机身沿指定方向周期平移。
- 参数说明:
- 参数1:机身周期平移方向。
- 参数2:机身平移运动周期,单位为s,范围为[1.5,8],输入0时代表停止平移。
- 返回值:无。
- 注意:控制机器狗身体沿指定方向周期平移,幅度为位置平移极限值的一半,
可以同时进行多个方向的周期运动。机身周期运动和整机运动不可同时进行。

- 功能简介:控制机器狗机身沿指定坐标轴周期旋转。
- 参数说明:
- 参数1:机身周期旋转的坐标轴。
- 参数2:机身旋转周期,单位为s,范围为[1.5,8],输入0时代表停止旋转。
- 返回值:无。

- 功能简介:机器狗停止所有运动,所有状态全部恢复到初始状态。
- 参数说明:无。
- 返回值:无。

- 功能简介:控制机器狗开启或关闭表演模式。当开启表演模式时,机器狗将顺序执行预设的动作。
- 参数说明:
- 返回值:无。

- 功能简介:控制机器狗执行预设动作。当预设动作执行结束后,会恢复到初始状态。
- 参数说明:
- 返回值:无。

- 功能简介:控制机器狗某条腿的末端到指定坐标位置。
- 参数说明:
- 参数1:要控制的腿。
- 参数2、3、4:腿的末端坐标值。此处坐标系为单腿坐标系,括号内的值表示X、Y、Z坐标的取值范围。
- 返回值:无。

- 功能简介:控制机器狗机械臂的末端到指定坐标位置。
- 参数说明:
- 参数1:末端位置的X坐标值。
- 参数2:末端位置的Z坐标值。此处坐标系以最近躯干的关节为原点,机器狗前进方向为X轴正向,上为Z轴正向。括号内的值表示X、Y、Z坐标的取值范围。
- 返回值:无。
- 注意:设定超过机械臂工作空间的值时,机械臂会保持最后一个有效值对应的姿态,
比如(155,0)对应的姿态是向前伸到最大,(0,155)对应向上伸到最大,(155,155)是斜向上最大,但是机械臂达不到这个位置,就会保持上一次发送的有效位置。

- 功能简介:控制机器狗机械臂夹爪张开的幅度。
- 参数说明:
- 参数1:夹爪张开幅度,取值范围0-255,0表示张开幅度最小,255表示最大。
- 返回值:无。

- 功能简介:卸载机器狗一条腿上的三个舵机,使之不输出力矩,之后可以用手随意转动。
- 参数说明:
- 返回值:无。

- 功能简介:卸载机器狗的所有舵机,使之不输出力矩,之后可以用手随意转动。
- 参数说明:无。
- 返回值:无。

- 功能简介:使机器狗一条腿上的三个舵机回到初始位置加载,输出力矩,之后不可以用手转动。
- 参数说明:
- 返回值:无。

- 功能简介:使机器狗所有舵机回到初始位置加载,输出力矩,之后不可以用手转动。
- 参数说明:无
- 返回值:无。

- 功能简介:读取机器狗电池点前电量。
- 参数说明:无
- 返回值:当前电量值。读取成功则返回1-100的整数,代表电池剩余电量百分比,读取失败则返回0。

- 功能简介:读取机器狗当前的机身姿态角度。
- 参数说明:
- 参数1:表示要读取的姿态角,翻滚角即机身绕X轴旋转的角度,俯仰角即机身绕Y轴旋转的角度,偏航角即机身绕Z轴旋转的角度
- 返回值:姿态角度值。读取成功则返回具体的角度值,为一个浮点数,读取失败则返回0。

- 功能简介:读取机器狗当前所有舵机转动的角度。
- 参数说明:无。
- 返回值:读取成功则返回长度为15的列表,
对应编号[11,12,13,21,22,23,31,32,33,41,42,43,51,52,53]的舵机角度,
读取失败则返回空列表。
舵机编号规则为第一位数字代表舵机所在的腿(1-左前腿,2-右前腿,3-右后腿,4-左后腿,5-机械臂),第二位数字代表在该腿(臂)上的位置,从末端到根部依次是1,2,3。

- 功能简介:修改机器狗的步态。
- 参数说明:
- 参数1:步态类型。初始默认步态是trot。trot是小步快走,walk是正常步态,high walk是抬高腿走。
- 返回值:无。

- 功能简介:修改机器狗的步频。
- 参数说明:
- 参数1:步频类型。有三个取值:低速、正常、高速。默认为正常步频。
- 返回值:无。

- 功能简介:单独控制机械臂上的两个舵机按照角度旋转。
- 参数说明:
- 参数1:要控制的舵机。括号内表示舵机旋转的角度范围。
- 参数2:舵机旋转的角度。
- 返回值:无。
- 注意:不熟悉的情况下,单独旋转某个舵机时,可能会卡住。尤其是旋转底部舵机。最好是先卸载机械臂的舵机,
然后读取要旋转到制定位置的角度值。然后再来进行旋转。

- 功能简介:获取机器狗的类型。
- 参数说明:无
- 返回值:返回值为MINI和LITE两种型号。

- 功能简介:对机器狗进行校准。当您发现您的机器狗姿态不正常时,如站立姿态时,某条腿严重偏离导致四条腿无法同时着地或者明显身体歪斜,很有可能是由于螺丝松动或舵机滑齿导致初始位置偏离预设值,此时您可以进行初始位置校准,以重新校准机器狗初始位置预设值。
- 如何校准
- 首先运行【机器狗开始校准】积木,此时机器狗的舵机将不再输出力矩,允许您转动所有关节。将机器狗按照下图姿势摆放,注意,使每条腿肩部垂直于身体,大腿垂直于地面,小腿垂直于大腿,,机械臂折叠放在背上,夹爪手动拉开到最大。
注意:摆放是否垂直将直接影响机器狗工作时的姿态。
- 然后再运行【机器狗停止校准】。大约10秒后,机器狗会自动站立,完成校准。
2. 注意事项
- 如果出现舵机转动卡住的情况,请迅速切断供电电源,避免烧毁舵机。
3. 积木块应用案例
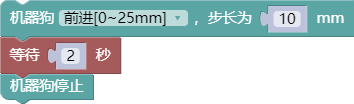
(图1)机器狗前进2秒后停止