机器人积木块区
1. 积木功能说明

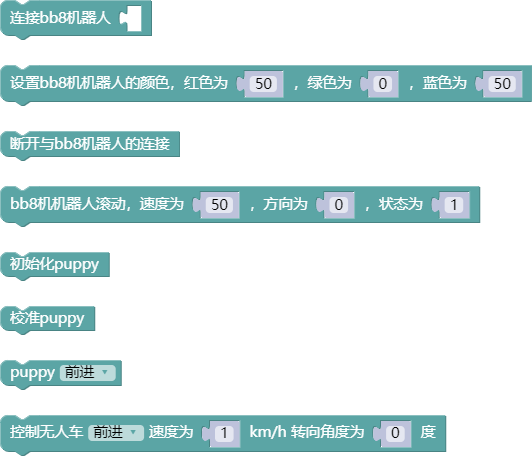
(图1)bb8机器人

- 功能简介:连接bb8机器人。
- 参数说明:
- 返回值:无。

- 功能简介:设置bb8机器人的颜色。
- 参数说明:
- 参数1:输入RGB中的红色;范围:0-255。
- 参数2:输入RGB中的绿色;范围:0-255。
- 参数3:输入RGB中的蓝色;范围:0-255。
- 返回值:无。

- 功能简介:断开与bb8机器人的连接。
- 参数说明:无。
- 返回值:无。

- 功能简介:bb8机器人滚动。
- 参数说明:
- 参数1:输入bb8机器人滚动的速度;范围:0-255;数据类型。
- 参数2:输入bb8机器人的方向;范围:0-259;数据类型。
- 参数3:输入bb8机器人的状态;0表示刹车,1表示运动。
- 返回值:无。

- 功能简介:初始化机器狗puppy。
- 参数说明:无。
- 返回值:无。

- 功能简介:校准机器狗puppy的12个舵机,通过修改配置文件里的参数使得机器狗在校准状态下四肢保持直立状态。
- 参数说明:无。
- 返回值:无。
- 功能简介:控制机器狗puppy运动;(需要先执行初始化puppy积木块)
- 参数说明:
- 参数1:选择puppy运动的状态;有前进,后退,左转,右转和停止。
- 返回值:无。

- 功能简介:控制无人车。
- 参数说明:
- 参数1:选择无人车运动的状态;有前进,后退和刹车。
- 参数2:输入无人车运动的速度;范围:0-20。
- 参数3:输入无人车转向角;范围:-120-120度;角度大于0右转,小于0左转。
- 返回值:无。
2. 注意事项
3. 积木块应用案例
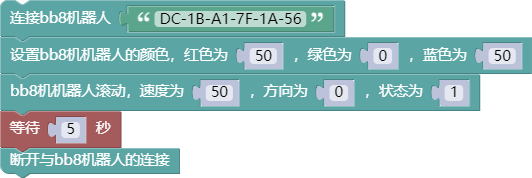
(图2)bb8机器人测试